|
|||||||||||||||||||||||||||||||||||
| Home | Products | Download | Ordering | Support | News | Contact | |||||||||||||||||||||||||||||||||||
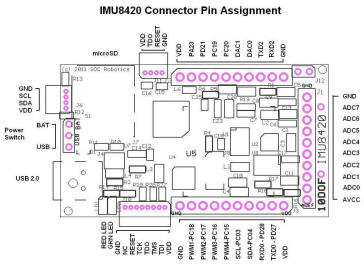
| Products > IMU Dataloggers > IMU8420 | |||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
| Home | Products | Download | Support | Ordering | News | Contact | |||||||||||||||||||||||||||||||||||
| © Copyright 2003-2024 SOC Robotics, Inc. All rights reserved. Privacy Policy | Terms of Use | Disclaimers | |||||||||||||||||||||||||||||||||||
| webmaster@soc-robotics.com Last update: June 30, 2024 | |||||||||||||||||||||||||||||||||||