|
Software Tools
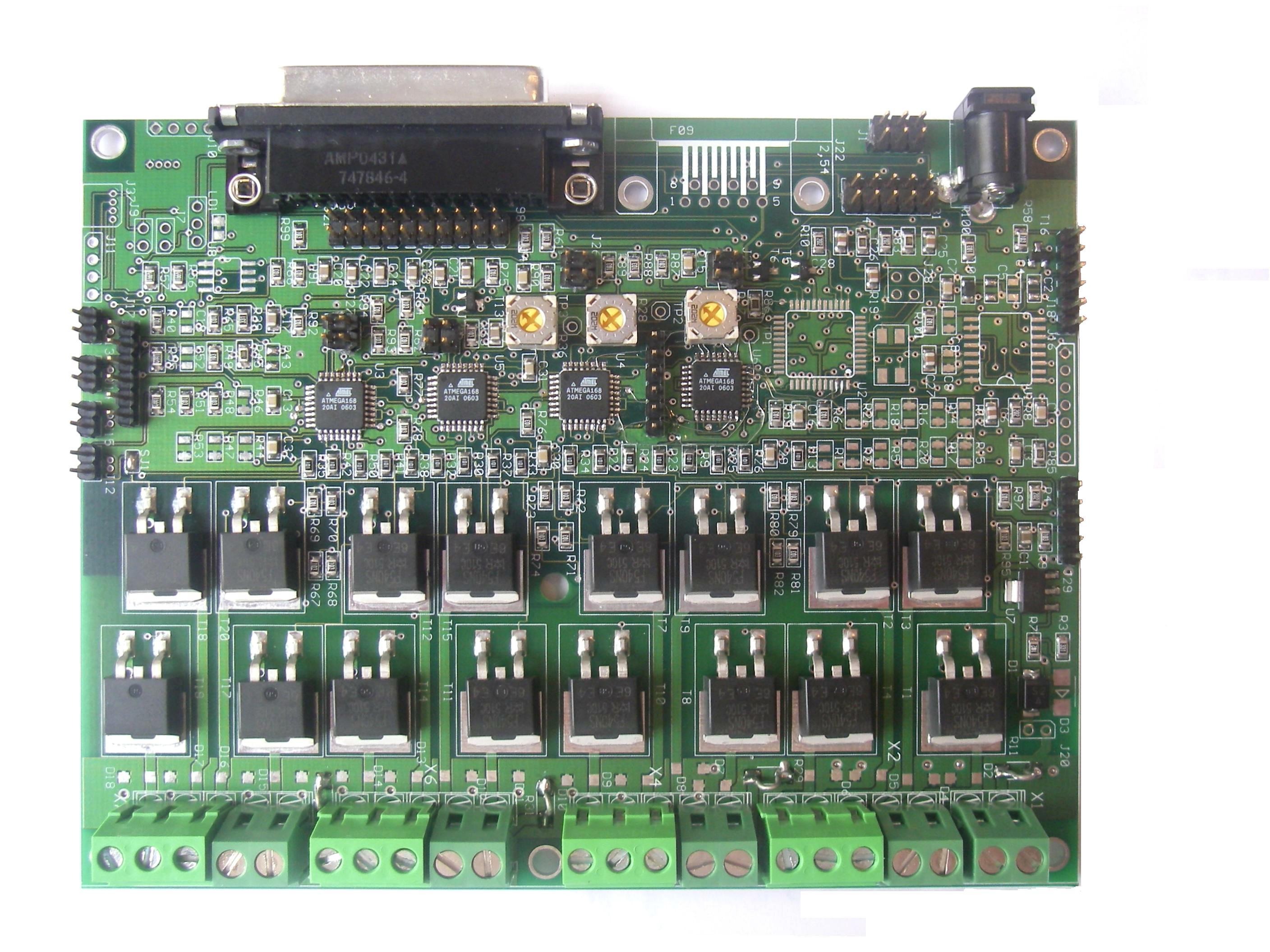
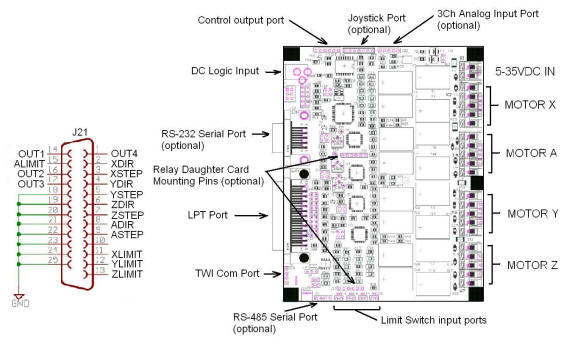
The MC433
is designed to work with a variety of third party G Code software programs.
Step input for each axis requires an active high pulse lasting at least
2useconds – step inputs are edge triggered. A high level on the Direction
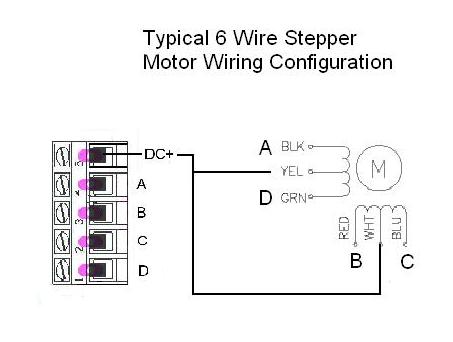
input will turn the stepper clockwise or counterclockwise depending on how
the motor is connected to the drive port. The direction signal is sampled
after the step trigger so it must remain stable for at least 10useconds
after the step trigger.
Control Processor Reprogramming
The
Software in each
Motor Control Processor can be user upgraded the next software release using
a free desktop programming utility MC433Prog.exe. MC433Prog.exe can be
downloaded from the download tab.
Expansion Options
The
MC433 has
several expansion options: Relay Adapters, Joysticks, DRO and USB
Communication Controllers.
Three Relay adapters are available
- each controlled by the Auxiliary output lines. A low current DC relay
array capable of handling 24VDC at 2A or 120VAC at 0.4A , a high
current relay array capable of handling 30VDC at 4A or 120VAC at 2A
and a hybrid MOSFET controller that can be configured to control three small
stepper motors or operate as 12 independent 2A 30V switches.
|